|
|
OOGST ROBOT
WAAROM ROBOTS ?
Onderzoek McKinsey: De tuinbouw in Nederland heeft op de huidige wijze geen toekomst.
Alleen de inzet van mechanisatie / robots geeft de mogelijkheid van een concurerende kostprijs ten opzichte van Spanje en Marokko.
2017: LTO noemt de inzet van robots vanwege hoge loonkosten en gebrek aan medewerkers 'strategisch bedrijfsbelang'.
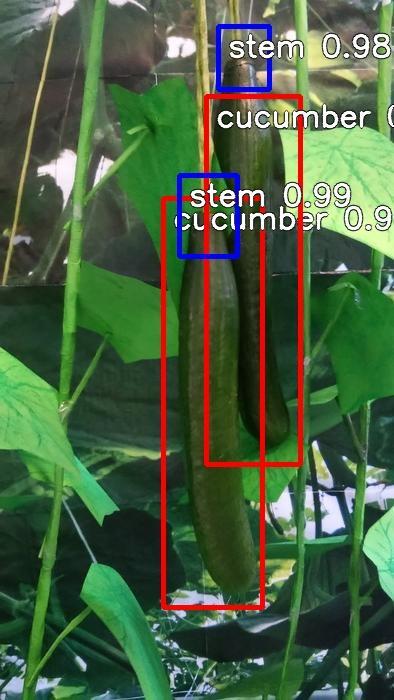
Beeldherkenning van komkommer
Waar staan we?
STAP 1 ( 1995 - 2010) : Bij het mechaniseren ging men eerst uit van een vaste robot waar de planten naar toe gebracht werden. Dit bracht allerlei plant-technische problemen met zich mee en vergde een hoge investering in een mobiele teeltsysteem. Alleen nog toegepast in de potplanten.
STAP 2: ( 2010 - 2017) : De onderzoekers richten zich op een mobiele robot die via de buisrail langs de planten gaat. Het probleem waar men tegenaan loopt is dat de achterkant van een dicht gewas niet goed te bereiken is.
STAP 3: ( 2017 ) Na de conclusie dat via de buisrail mechanisatie van oogst en gewaswerk niet goed mogelijk blijkt wordt de robotisering van bovenaf opgepakt waarna tal van gespecialiseerde robots hun intrede doen.
MONORAIL vs RAILSPANT
Bij een bovenliggend railsysteem denk je in eerste instantie aan een monorailsysteem dit is echter geen optie. Een railspant is deel van de kasconstructie en bij uitstek geschikt om robots optimaal in te zetten.
- MAATVAST
- ZWARE BELASINGEN GEEN PROBLEEM
- GEEN LICHTVERLIES
'- LAGE INVESTERING
NB Gewasdraden, goten en dergelijke zijn altijd opgehangen aan de tralieliggers, dit betekent dat bovendoor 'met de paden mee' niet mogelijk is. Willen we bovenddoor dan is haaks op de teeltrichting, dus is met de tralieliggers mee, en gebruik makend van de tralieligger, de enige mogelijkheid.
|
|
|
|
MORGEN AAN DE SLAG

'Sweeper' project WUR:
OOGSTEN ACHTERKANT BLIJKT PROBLEEM
Door de robot van bovenaf door de kas te laten bewegen kan deze de achterkanten oogsten.
De high tech apparatuur is op die wijze ook minder kwetsbaar en verder wordt de interne logistiek niet verstoord.
OPZET POTPLANTENKWEKERIJ ALS VOORBEELD
Bij een potplanten kwekerij wordt eerst de logistiek volledig uitgewerkt pas daarna komt de kas aan de beurt. Deze opzet waarbij een functioneel ontwerp voor logistiek en inzet robots centraal staat is ook de weg voor bloemen en groetentelers die gaan nieuwbouwen.
In de rijen teelt van potplanten of de boomkwekerij zien we regelmatig een overgewaswagen waaraan apparatuur hangt die het gewas rondom bewerkt. Door vanuit de buisrail te blijven denken kom je niet verder.
HET VRIJHOUDEN VAN HET BETONPAD / LOGISTIEK
Stel dat ( over vele jaren) de robot slim en flexibel genoeg is om vanaf de buisrail te kunnen werken dan kan het handig zijn om de robot in het eerste vak direct naast het betonpad bovendoor over te zetten naar de volgende buisrail.
Hierdoor blijft het betonpad vrij voor dagelijkse verkeer van product en medewerkers.
VEILIGHEID
In een werkomgeving waarin autonome apparatuur en medewerkers werken zijn strenge voorzieningen verplicht om de veiligheid van medewerkers te garanderen.
Het domein van de robot is boven, geen mensen, geen andere logistiek en maatvast.
Het domein van de medewerker is beneden, via betonpad en buisrail.
Zonlicht en reflectie zijn erg vervelend voor camera's ( denk aan de noodzaak om vangkaarten te fotograferen in de Scoutbox). Door een zonnescherm op de spantkar heeft de camera geen last van de zon / reflectie.
Ook kan de robot steeds bijvoorbeeld de zonkant van de rijen bewerken of steeds van links naar rechts te werken voor eenvoudiger automatiseren.
Zie ook:
cf-gewasscan
actief-witte-vlieg-en-thrips-wegvangen
|

